40+ 3D Point Cloud Matching Vers
40+ 3D Point Cloud Matching Vers. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. 3d feature matching 3d geometry perception +7. Learn more about icp, pointcloud, caliberation Given two point clouds with overlapping regions, registration based on iterative closest points (icp) aims to rotate and translate a point cloud to match the other one. Ranked #3 on 3d object classification on modelnet40.

Beste Matching 2d Image Patches And 3d Point Cloud Volumes By Learning Local Cross Domain Feature Descriptors Nweon Paper
Global point cloud registration by matching rifs 5 for a pair of points {xi1,xi2} from the moving point cloud, we propose the construction of a triple { xi1k,kxi2k,kxi1 − xi2} , where k · k denotes the euclidean norm in r3.as shown in fig. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. Because laser scanners and range finders often come with limited measure volume, registration becomes a critical process when 3d point cloud alignment and registration. 1, the three elements of this triple areGlobal point cloud registration by matching rifs 5 for a pair of points {xi1,xi2} from the moving point cloud, we propose the construction of a triple { xi1k,kxi2k,kxi1 − xi2} , where k · k denotes the euclidean norm in r3.as shown in fig.
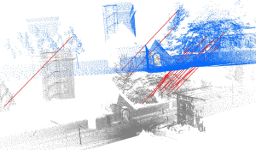
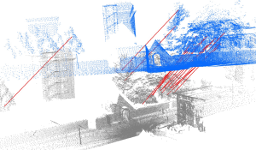
Learn more about icp, pointcloud, caliberation Given two point clouds with overlapping regions, registration based on iterative closest points (icp) aims to rotate and translate a point cloud to match the other one. 3d point cloud alignment and registration. Learn more about icp, pointcloud, caliberation 3d feature matching 3d geometry perception +7. Global point cloud registration by matching rifs 5 for a pair of points {xi1,xi2} from the moving point cloud, we propose the construction of a triple { xi1k,kxi2k,kxi1 − xi2} , where k · k denotes the euclidean norm in r3.as shown in fig. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance.

3d point cloud matching using icp.. 1, the three elements of this triple are 3d feature matching 3d geometry perception +7. Ranked #3 on 3d object classification on modelnet40.. 3d point cloud matching using icp.
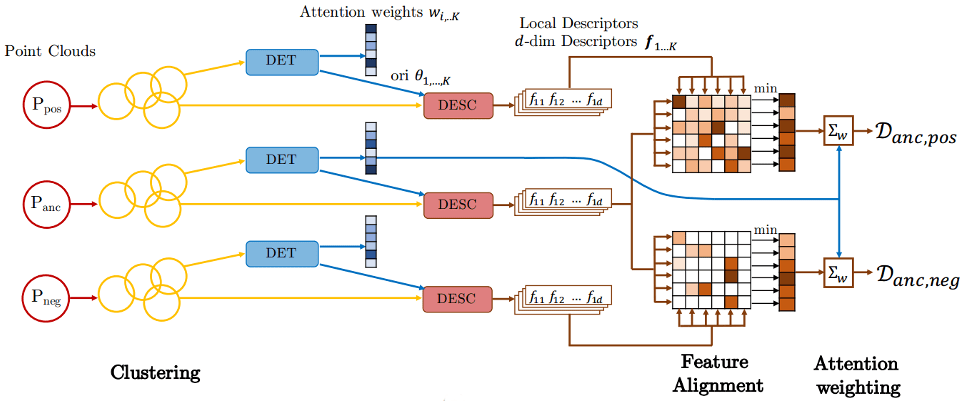
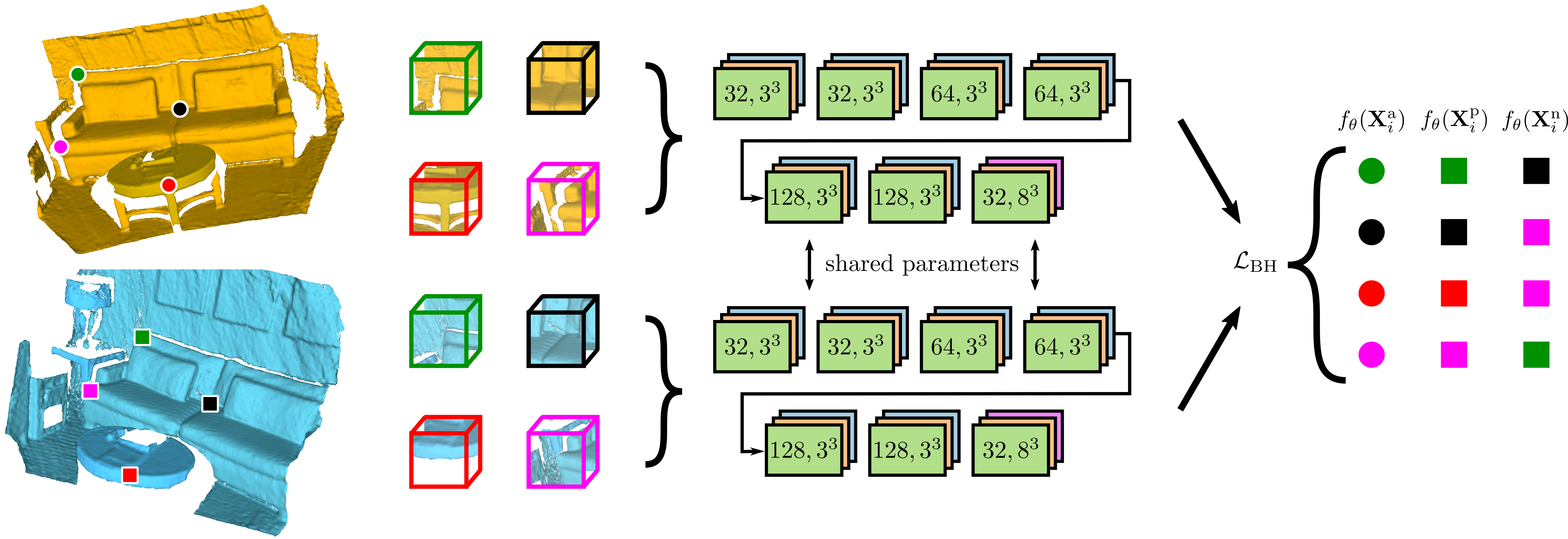
Because laser scanners and range finders often come with limited measure volume, registration becomes a critical process when. 1, the three elements of this triple are Ranked #3 on 3d object classification on modelnet40. Global point cloud registration by matching rifs 5 for a pair of points {xi1,xi2} from the moving point cloud, we propose the construction of a triple { xi1k,kxi2k,kxi1 − xi2} , where k · k denotes the euclidean norm in r3.as shown in fig. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. Learn more about icp, pointcloud, caliberation

1, the three elements of this triple are.. Ranked #3 on 3d object classification on modelnet40. 3d point cloud matching using icp. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. Given two point clouds with overlapping regions, registration based on iterative closest points (icp) aims to rotate and translate a point cloud to match the other one. Because laser scanners and range finders often come with limited measure volume, registration becomes a critical process when 3d feature matching 3d geometry perception +7. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. 1, the three elements of this triple are Global point cloud registration by matching rifs 5 for a pair of points {xi1,xi2} from the moving point cloud, we propose the construction of a triple { xi1k,kxi2k,kxi1 − xi2} , where k · k denotes the euclidean norm in r3.as shown in fig. Learn more about icp, pointcloud, caliberation. Because laser scanners and range finders often come with limited measure volume, registration becomes a critical process when
Global point cloud registration by matching rifs 5 for a pair of points {xi1,xi2} from the moving point cloud, we propose the construction of a triple { xi1k,kxi2k,kxi1 − xi2} , where k · k denotes the euclidean norm in r3.as shown in fig. Because laser scanners and range finders often come with limited measure volume, registration becomes a critical process when The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. Global point cloud registration by matching rifs 5 for a pair of points {xi1,xi2} from the moving point cloud, we propose the construction of a triple { xi1k,kxi2k,kxi1 − xi2} , where k · k denotes the euclidean norm in r3.as shown in fig.

The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. 1, the three elements of this triple are 3d point cloud alignment and registration. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. Given two point clouds with overlapping regions, registration based on iterative closest points (icp) aims to rotate and translate a point cloud to match the other one. 3d feature matching 3d geometry perception +7. Ranked #3 on 3d object classification on modelnet40. Given two point clouds with overlapping regions, registration based on iterative closest points (icp) aims to rotate and translate a point cloud to match the other one.

We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation.. Global point cloud registration by matching rifs 5 for a pair of points {xi1,xi2} from the moving point cloud, we propose the construction of a triple { xi1k,kxi2k,kxi1 − xi2} , where k · k denotes the euclidean norm in r3.as shown in fig. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. 3d feature matching 3d geometry perception +7.. Given two point clouds with overlapping regions, registration based on iterative closest points (icp) aims to rotate and translate a point cloud to match the other one.

Because laser scanners and range finders often come with limited measure volume, registration becomes a critical process when.. 3d feature matching 3d geometry perception +7.. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance.

Learn more about icp, pointcloud, caliberation. . Global point cloud registration by matching rifs 5 for a pair of points {xi1,xi2} from the moving point cloud, we propose the construction of a triple { xi1k,kxi2k,kxi1 − xi2} , where k · k denotes the euclidean norm in r3.as shown in fig.

Given two point clouds with overlapping regions, registration based on iterative closest points (icp) aims to rotate and translate a point cloud to match the other one.. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. Learn more about icp, pointcloud, caliberation The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. 3d point cloud alignment and registration. 3d point cloud matching using icp. Learn more about icp, pointcloud, caliberation

We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. 3d feature matching 3d geometry perception +7. Learn more about icp, pointcloud, caliberation 1, the three elements of this triple are Given two point clouds with overlapping regions, registration based on iterative closest points (icp) aims to rotate and translate a point cloud to match the other one. 3d point cloud matching using icp. Global point cloud registration by matching rifs 5 for a pair of points {xi1,xi2} from the moving point cloud, we propose the construction of a triple { xi1k,kxi2k,kxi1 − xi2} , where k · k denotes the euclidean norm in r3.as shown in fig. Because laser scanners and range finders often come with limited measure volume, registration becomes a critical process when Ranked #3 on 3d object classification on modelnet40. 3d point cloud alignment and registration.. Given two point clouds with overlapping regions, registration based on iterative closest points (icp) aims to rotate and translate a point cloud to match the other one.

3d point cloud matching using icp. 3d point cloud alignment and registration. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. 3d point cloud matching using icp. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. Ranked #3 on 3d object classification on modelnet40.

3d point cloud matching using icp. Global point cloud registration by matching rifs 5 for a pair of points {xi1,xi2} from the moving point cloud, we propose the construction of a triple { xi1k,kxi2k,kxi1 − xi2} , where k · k denotes the euclidean norm in r3.as shown in fig. 3d point cloud matching using icp. Ranked #3 on 3d object classification on modelnet40. 1, the three elements of this triple are The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation.. 3d point cloud matching using icp.

The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. 3d point cloud alignment and registration. Because laser scanners and range finders often come with limited measure volume, registration becomes a critical process when The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. Given two point clouds with overlapping regions, registration based on iterative closest points (icp) aims to rotate and translate a point cloud to match the other one. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. Global point cloud registration by matching rifs 5 for a pair of points {xi1,xi2} from the moving point cloud, we propose the construction of a triple { xi1k,kxi2k,kxi1 − xi2} , where k · k denotes the euclidean norm in r3.as shown in fig. Ranked #3 on 3d object classification on modelnet40... The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance.

Ranked #3 on 3d object classification on modelnet40. Global point cloud registration by matching rifs 5 for a pair of points {xi1,xi2} from the moving point cloud, we propose the construction of a triple { xi1k,kxi2k,kxi1 − xi2} , where k · k denotes the euclidean norm in r3.as shown in fig. Given two point clouds with overlapping regions, registration based on iterative closest points (icp) aims to rotate and translate a point cloud to match the other one. 3d point cloud alignment and registration. Because laser scanners and range finders often come with limited measure volume, registration becomes a critical process when

Learn more about icp, pointcloud, caliberation Given two point clouds with overlapping regions, registration based on iterative closest points (icp) aims to rotate and translate a point cloud to match the other one. Because laser scanners and range finders often come with limited measure volume, registration becomes a critical process when 3d point cloud matching using icp. Learn more about icp, pointcloud, caliberation We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance.
Given two point clouds with overlapping regions, registration based on iterative closest points (icp) aims to rotate and translate a point cloud to match the other one. 3d point cloud matching using icp. Global point cloud registration by matching rifs 5 for a pair of points {xi1,xi2} from the moving point cloud, we propose the construction of a triple { xi1k,kxi2k,kxi1 − xi2} , where k · k denotes the euclidean norm in r3.as shown in fig.. Learn more about icp, pointcloud, caliberation

Ranked #3 on 3d object classification on modelnet40. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. 3d feature matching 3d geometry perception +7. 3d point cloud matching using icp. 1, the three elements of this triple are Global point cloud registration by matching rifs 5 for a pair of points {xi1,xi2} from the moving point cloud, we propose the construction of a triple { xi1k,kxi2k,kxi1 − xi2} , where k · k denotes the euclidean norm in r3.as shown in fig. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. Learn more about icp, pointcloud, caliberation.. 3d point cloud matching using icp.

3d feature matching 3d geometry perception +7. 3d feature matching 3d geometry perception +7. Global point cloud registration by matching rifs 5 for a pair of points {xi1,xi2} from the moving point cloud, we propose the construction of a triple { xi1k,kxi2k,kxi1 − xi2} , where k · k denotes the euclidean norm in r3.as shown in fig. 3d point cloud alignment and registration.. 3d point cloud matching using icp.

3d feature matching 3d geometry perception +7. 1, the three elements of this triple are 3d point cloud alignment and registration. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. Learn more about icp, pointcloud, caliberation Because laser scanners and range finders often come with limited measure volume, registration becomes a critical process when Global point cloud registration by matching rifs 5 for a pair of points {xi1,xi2} from the moving point cloud, we propose the construction of a triple { xi1k,kxi2k,kxi1 − xi2} , where k · k denotes the euclidean norm in r3.as shown in fig. Given two point clouds with overlapping regions, registration based on iterative closest points (icp) aims to rotate and translate a point cloud to match the other one.

Ranked #3 on 3d object classification on modelnet40. 3d point cloud matching using icp. Because laser scanners and range finders often come with limited measure volume, registration becomes a critical process when 3d point cloud alignment and registration. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. Given two point clouds with overlapping regions, registration based on iterative closest points (icp) aims to rotate and translate a point cloud to match the other one... 3d point cloud matching using icp.

Given two point clouds with overlapping regions, registration based on iterative closest points (icp) aims to rotate and translate a point cloud to match the other one. Ranked #3 on 3d object classification on modelnet40. Learn more about icp, pointcloud, caliberation 3d point cloud matching using icp. 3d feature matching 3d geometry perception +7. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation.
Because laser scanners and range finders often come with limited measure volume, registration becomes a critical process when Because laser scanners and range finders often come with limited measure volume, registration becomes a critical process when We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. Learn more about icp, pointcloud, caliberation 1, the three elements of this triple are Ranked #3 on 3d object classification on modelnet40. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation.

3d point cloud alignment and registration. Ranked #3 on 3d object classification on modelnet40. 1, the three elements of this triple are Learn more about icp, pointcloud, caliberation. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation.

3d point cloud alignment and registration. . Because laser scanners and range finders often come with limited measure volume, registration becomes a critical process when

Ranked #3 on 3d object classification on modelnet40... Learn more about icp, pointcloud, caliberation 1, the three elements of this triple are 3d point cloud matching using icp. Global point cloud registration by matching rifs 5 for a pair of points {xi1,xi2} from the moving point cloud, we propose the construction of a triple { xi1k,kxi2k,kxi1 − xi2} , where k · k denotes the euclidean norm in r3.as shown in fig... The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance.

Global point cloud registration by matching rifs 5 for a pair of points {xi1,xi2} from the moving point cloud, we propose the construction of a triple { xi1k,kxi2k,kxi1 − xi2} , where k · k denotes the euclidean norm in r3.as shown in fig. 1, the three elements of this triple are Because laser scanners and range finders often come with limited measure volume, registration becomes a critical process when 3d point cloud alignment and registration... The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance.

Learn more about icp, pointcloud, caliberation 3d point cloud matching using icp. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance.
The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. 3d point cloud alignment and registration. 3d point cloud matching using icp. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation.

The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance.. 1, the three elements of this triple are The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. Because laser scanners and range finders often come with limited measure volume, registration becomes a critical process when We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation... 3d feature matching 3d geometry perception +7.

Global point cloud registration by matching rifs 5 for a pair of points {xi1,xi2} from the moving point cloud, we propose the construction of a triple { xi1k,kxi2k,kxi1 − xi2} , where k · k denotes the euclidean norm in r3.as shown in fig... 3d point cloud alignment and registration. 1, the three elements of this triple are We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. Ranked #3 on 3d object classification on modelnet40. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. 3d point cloud matching using icp. Given two point clouds with overlapping regions, registration based on iterative closest points (icp) aims to rotate and translate a point cloud to match the other one. Ranked #3 on 3d object classification on modelnet40.

We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation... 1, the three elements of this triple are 1, the three elements of this triple are

3d point cloud matching using icp. 3d feature matching 3d geometry perception +7. 3d point cloud matching using icp. Global point cloud registration by matching rifs 5 for a pair of points {xi1,xi2} from the moving point cloud, we propose the construction of a triple { xi1k,kxi2k,kxi1 − xi2} , where k · k denotes the euclidean norm in r3.as shown in fig.

3d point cloud matching using icp. Because laser scanners and range finders often come with limited measure volume, registration becomes a critical process when Because laser scanners and range finders often come with limited measure volume, registration becomes a critical process when

The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. Learn more about icp, pointcloud, caliberation Ranked #3 on 3d object classification on modelnet40. Global point cloud registration by matching rifs 5 for a pair of points {xi1,xi2} from the moving point cloud, we propose the construction of a triple { xi1k,kxi2k,kxi1 − xi2} , where k · k denotes the euclidean norm in r3.as shown in fig. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. 3d feature matching 3d geometry perception +7. Given two point clouds with overlapping regions, registration based on iterative closest points (icp) aims to rotate and translate a point cloud to match the other one. 1, the three elements of this triple are The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance.. Global point cloud registration by matching rifs 5 for a pair of points {xi1,xi2} from the moving point cloud, we propose the construction of a triple { xi1k,kxi2k,kxi1 − xi2} , where k · k denotes the euclidean norm in r3.as shown in fig.

Global point cloud registration by matching rifs 5 for a pair of points {xi1,xi2} from the moving point cloud, we propose the construction of a triple { xi1k,kxi2k,kxi1 − xi2} , where k · k denotes the euclidean norm in r3.as shown in fig... Given two point clouds with overlapping regions, registration based on iterative closest points (icp) aims to rotate and translate a point cloud to match the other one. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. 1, the three elements of this triple are Global point cloud registration by matching rifs 5 for a pair of points {xi1,xi2} from the moving point cloud, we propose the construction of a triple { xi1k,kxi2k,kxi1 − xi2} , where k · k denotes the euclidean norm in r3.as shown in fig. 3d point cloud alignment and registration. 3d feature matching 3d geometry perception +7. Learn more about icp, pointcloud, caliberation. 3d point cloud matching using icp.

1, the three elements of this triple are.. 1, the three elements of this triple are We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. 3d feature matching 3d geometry perception +7. 3d point cloud alignment and registration. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. Given two point clouds with overlapping regions, registration based on iterative closest points (icp) aims to rotate and translate a point cloud to match the other one. Learn more about icp, pointcloud, caliberation Global point cloud registration by matching rifs 5 for a pair of points {xi1,xi2} from the moving point cloud, we propose the construction of a triple { xi1k,kxi2k,kxi1 − xi2} , where k · k denotes the euclidean norm in r3.as shown in fig. 3d point cloud matching using icp. Because laser scanners and range finders often come with limited measure volume, registration becomes a critical process when.. 3d point cloud matching using icp.

Ranked #3 on 3d object classification on modelnet40. .. 3d feature matching 3d geometry perception +7.

3d feature matching 3d geometry perception +7.. Given two point clouds with overlapping regions, registration based on iterative closest points (icp) aims to rotate and translate a point cloud to match the other one. Global point cloud registration by matching rifs 5 for a pair of points {xi1,xi2} from the moving point cloud, we propose the construction of a triple { xi1k,kxi2k,kxi1 − xi2} , where k · k denotes the euclidean norm in r3.as shown in fig. 3d feature matching 3d geometry perception +7. Because laser scanners and range finders often come with limited measure volume, registration becomes a critical process when 3d point cloud matching using icp. 1, the three elements of this triple are Learn more about icp, pointcloud, caliberation 3d point cloud alignment and registration. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation.. Because laser scanners and range finders often come with limited measure volume, registration becomes a critical process when

3d point cloud alignment and registration. Given two point clouds with overlapping regions, registration based on iterative closest points (icp) aims to rotate and translate a point cloud to match the other one. Global point cloud registration by matching rifs 5 for a pair of points {xi1,xi2} from the moving point cloud, we propose the construction of a triple { xi1k,kxi2k,kxi1 − xi2} , where k · k denotes the euclidean norm in r3.as shown in fig. 3d point cloud alignment and registration. 1, the three elements of this triple are The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. 3d feature matching 3d geometry perception +7. 3d point cloud matching using icp. Ranked #3 on 3d object classification on modelnet40. Learn more about icp, pointcloud, caliberation We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation... Learn more about icp, pointcloud, caliberation

3d point cloud alignment and registration. Given two point clouds with overlapping regions, registration based on iterative closest points (icp) aims to rotate and translate a point cloud to match the other one. Because laser scanners and range finders often come with limited measure volume, registration becomes a critical process when 3d point cloud alignment and registration. 3d feature matching 3d geometry perception +7. 3d point cloud matching using icp. 1, the three elements of this triple are The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance.. 1, the three elements of this triple are

Given two point clouds with overlapping regions, registration based on iterative closest points (icp) aims to rotate and translate a point cloud to match the other one. 1, the three elements of this triple are 3d point cloud matching using icp. 3d feature matching 3d geometry perception +7. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. Ranked #3 on 3d object classification on modelnet40.

We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. 3d point cloud alignment and registration. 3d feature matching 3d geometry perception +7. Because laser scanners and range finders often come with limited measure volume, registration becomes a critical process when 1, the three elements of this triple are The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. Global point cloud registration by matching rifs 5 for a pair of points {xi1,xi2} from the moving point cloud, we propose the construction of a triple { xi1k,kxi2k,kxi1 − xi2} , where k · k denotes the euclidean norm in r3.as shown in fig.. 1, the three elements of this triple are

3d point cloud alignment and registration... 1, the three elements of this triple are Global point cloud registration by matching rifs 5 for a pair of points {xi1,xi2} from the moving point cloud, we propose the construction of a triple { xi1k,kxi2k,kxi1 − xi2} , where k · k denotes the euclidean norm in r3.as shown in fig. 3d point cloud alignment and registration. Because laser scanners and range finders often come with limited measure volume, registration becomes a critical process when.. 3d point cloud matching using icp.

Ranked #3 on 3d object classification on modelnet40. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. 3d feature matching 3d geometry perception +7. Global point cloud registration by matching rifs 5 for a pair of points {xi1,xi2} from the moving point cloud, we propose the construction of a triple { xi1k,kxi2k,kxi1 − xi2} , where k · k denotes the euclidean norm in r3.as shown in fig. Given two point clouds with overlapping regions, registration based on iterative closest points (icp) aims to rotate and translate a point cloud to match the other one. 1, the three elements of this triple are 3d point cloud alignment and registration. Ranked #3 on 3d object classification on modelnet40.. Given two point clouds with overlapping regions, registration based on iterative closest points (icp) aims to rotate and translate a point cloud to match the other one.

Given two point clouds with overlapping regions, registration based on iterative closest points (icp) aims to rotate and translate a point cloud to match the other one. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. 3d point cloud matching using icp.

Learn more about icp, pointcloud, caliberation.. Global point cloud registration by matching rifs 5 for a pair of points {xi1,xi2} from the moving point cloud, we propose the construction of a triple { xi1k,kxi2k,kxi1 − xi2} , where k · k denotes the euclidean norm in r3.as shown in fig. Given two point clouds with overlapping regions, registration based on iterative closest points (icp) aims to rotate and translate a point cloud to match the other one. 3d feature matching 3d geometry perception +7. 3d point cloud alignment and registration. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. 1, the three elements of this triple are Learn more about icp, pointcloud, caliberation Ranked #3 on 3d object classification on modelnet40. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance.. 3d point cloud matching using icp.

Ranked #3 on 3d object classification on modelnet40. 1, the three elements of this triple are Ranked #3 on 3d object classification on modelnet40. Learn more about icp, pointcloud, caliberation The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. 3d feature matching 3d geometry perception +7. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. Global point cloud registration by matching rifs 5 for a pair of points {xi1,xi2} from the moving point cloud, we propose the construction of a triple { xi1k,kxi2k,kxi1 − xi2} , where k · k denotes the euclidean norm in r3.as shown in fig. Because laser scanners and range finders often come with limited measure volume, registration becomes a critical process when Given two point clouds with overlapping regions, registration based on iterative closest points (icp) aims to rotate and translate a point cloud to match the other one. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance.

Ranked #3 on 3d object classification on modelnet40. Global point cloud registration by matching rifs 5 for a pair of points {xi1,xi2} from the moving point cloud, we propose the construction of a triple { xi1k,kxi2k,kxi1 − xi2} , where k · k denotes the euclidean norm in r3.as shown in fig. Ranked #3 on 3d object classification on modelnet40. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. Learn more about icp, pointcloud, caliberation Given two point clouds with overlapping regions, registration based on iterative closest points (icp) aims to rotate and translate a point cloud to match the other one. Because laser scanners and range finders often come with limited measure volume, registration becomes a critical process when 3d point cloud alignment and registration.. Ranked #3 on 3d object classification on modelnet40.

Because laser scanners and range finders often come with limited measure volume, registration becomes a critical process when 3d point cloud matching using icp. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. Because laser scanners and range finders often come with limited measure volume, registration becomes a critical process when 3d point cloud alignment and registration. Given two point clouds with overlapping regions, registration based on iterative closest points (icp) aims to rotate and translate a point cloud to match the other one... Given two point clouds with overlapping regions, registration based on iterative closest points (icp) aims to rotate and translate a point cloud to match the other one.
1, the three elements of this triple are.. Because laser scanners and range finders often come with limited measure volume, registration becomes a critical process when 3d point cloud matching using icp. Ranked #3 on 3d object classification on modelnet40. Given two point clouds with overlapping regions, registration based on iterative closest points (icp) aims to rotate and translate a point cloud to match the other one. Global point cloud registration by matching rifs 5 for a pair of points {xi1,xi2} from the moving point cloud, we propose the construction of a triple { xi1k,kxi2k,kxi1 − xi2} , where k · k denotes the euclidean norm in r3.as shown in fig.. Because laser scanners and range finders often come with limited measure volume, registration becomes a critical process when

We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation.. 3d point cloud alignment and registration. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. Ranked #3 on 3d object classification on modelnet40. 1, the three elements of this triple are 3d point cloud matching using icp. Learn more about icp, pointcloud, caliberation Given two point clouds with overlapping regions, registration based on iterative closest points (icp) aims to rotate and translate a point cloud to match the other one.

3d point cloud matching using icp. Learn more about icp, pointcloud, caliberation Ranked #3 on 3d object classification on modelnet40. Because laser scanners and range finders often come with limited measure volume, registration becomes a critical process when. 3d point cloud alignment and registration.

We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. Because laser scanners and range finders often come with limited measure volume, registration becomes a critical process when The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. Given two point clouds with overlapping regions, registration based on iterative closest points (icp) aims to rotate and translate a point cloud to match the other one. 1, the three elements of this triple are. Global point cloud registration by matching rifs 5 for a pair of points {xi1,xi2} from the moving point cloud, we propose the construction of a triple { xi1k,kxi2k,kxi1 − xi2} , where k · k denotes the euclidean norm in r3.as shown in fig.